Smart Vision and AI-enabled Autonomous Robots for Waste Identification and Sorting
Research Lead
Shanaka Kristombu Baduge
Funding
CRC-P Round 10: “Smart AI-enabled automation and upcycling solution for plastic recycling” ($ 2 M)
Research partners and collaborators
Advanced Circular Polymers, Melbourne, Australia
Overview
This research project aims to develop and install more efficient sorting technologies using AI, computer vision and automation. As the current AI-based products utilised in Australia are not trained for local waste streams, it causes inefficient sorting operations. Training them for local waste streams will revolutionise Australian recycling capabilities. Moreover, the research findings will practically implement and enhance the overall efficiency and accuracy not only in plastic waste sorting but also for e-waste, and garbage waste, especially for the hazardous waste generated from decommissioning oil and gas infrastructure facilities.
The decommissioning of existing oil and gas infrastructure facilities will be a major concern in the coming years with the ongoing global decarbonisation trend to reach net zero targets. As mandated in a range of national and international policies, it should happen in a safe, environmentally, and socially responsible manner. As it involves the safe removal of used contaminated hazardous equipment and parts, pre-sorting these items can be achieved through the already developed vision and industrial robot system, drastically reducing human involvement and associated severe health risks.
Capabilities
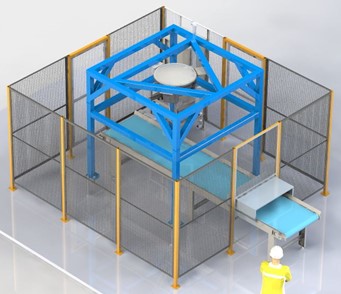
Advanced waste sorting prototype platform with ABB IRB 360 Flexpicker with IRC5 controller:
A fully functional prototype platform equipped with the latest ABB IRB 360 Flexpicker, a delta robot with an 8 kg payload capacity and 1130 mm maximum reach. The system comprises a 4m length industrial conveyor system with variable running speeds and a designated industrial camera setup.
High-performing computing system:
An industrial high-performance computer unit, along with the computer obtained from the Melbourne Research Cloud, will be used to train the state-of-the-art deep learning algorithms for plastic sorting and the large set of data annotations, which will be adopted for other waste categories in the latter part.
Industrial vision system with RGB and hyperspectral imaging cameras:
Industry-standard area scan cameras (RGB) with dedicated lighting systems to identify waste items from their physical parameters (shape, size, colour).
The hyperspectral imaging cameras, which facilitate both spatial and spectral images of the waste items, ease and enhance separation accuracy. All plastics have unique spectral properties that cannot be discerned by RGB cameras or the human eye due to their chemical structure. By utilising these advanced cameras, it is possible to detect the spectral signature of each pixel of the acquired image in different wavelength regions (visible, near-infrared, short-wave infrared etc.); hence, through spatial resolution, a Hyperspectral imaging camera can separate even the smaller plastic pieces which passes along a conveyor belt at high speed.
Key Outcomes
The following outcomes are expected to achieve through this project.
• Collection and preparation of a comprehensive database for plastic waste sorting, comprising the Australian consumer product ranges and developing efficient methods to annotate large datasets to train AI-driven deep learning algorithms.
• Developing a pilot project integrating AI, smart vision, and industrial robots, combined with enhanced picking efficiency and accuracy to be deployed and tested in the partner company premises.
• Upgrading and commercialisation of the AI autonomous sorting system for other waste streams (e-waste, general garbage) and hazardous waste generated from decommissioning of oil and gas infrastructure facilities.
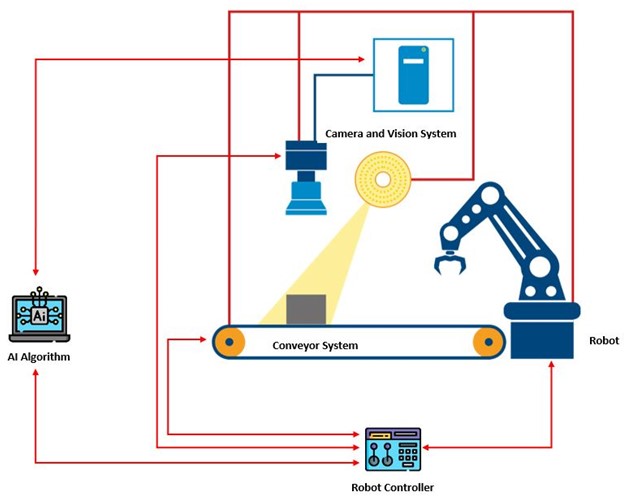
Integrating AI, smart vision and industrial robotics for enhanced picking efficiency and accuracy
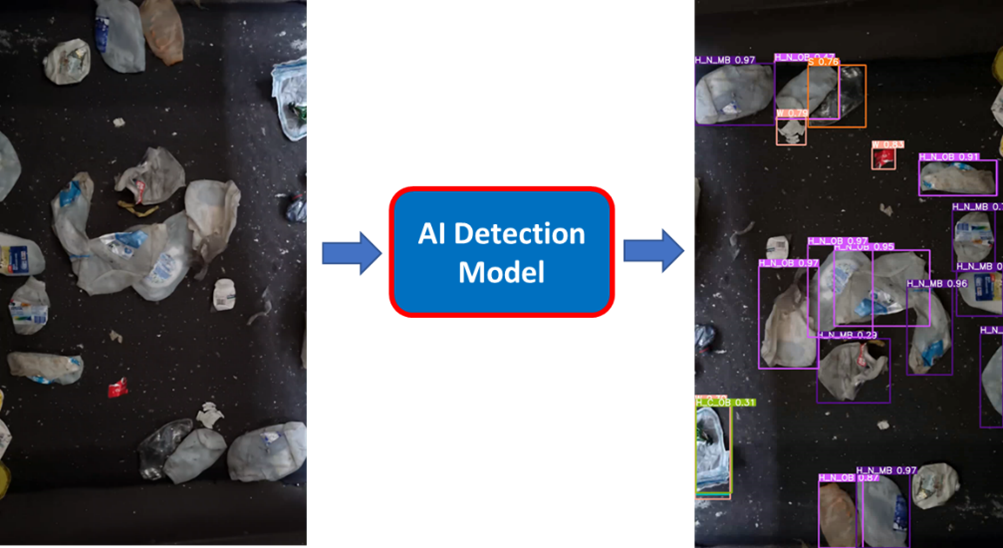
AI and deep learning algorithms for waste identification
Developed prototype waste sorting prototype platform with ABB IRB 360 Flexpicker with IRC5 controller at the university laboratory premises.